


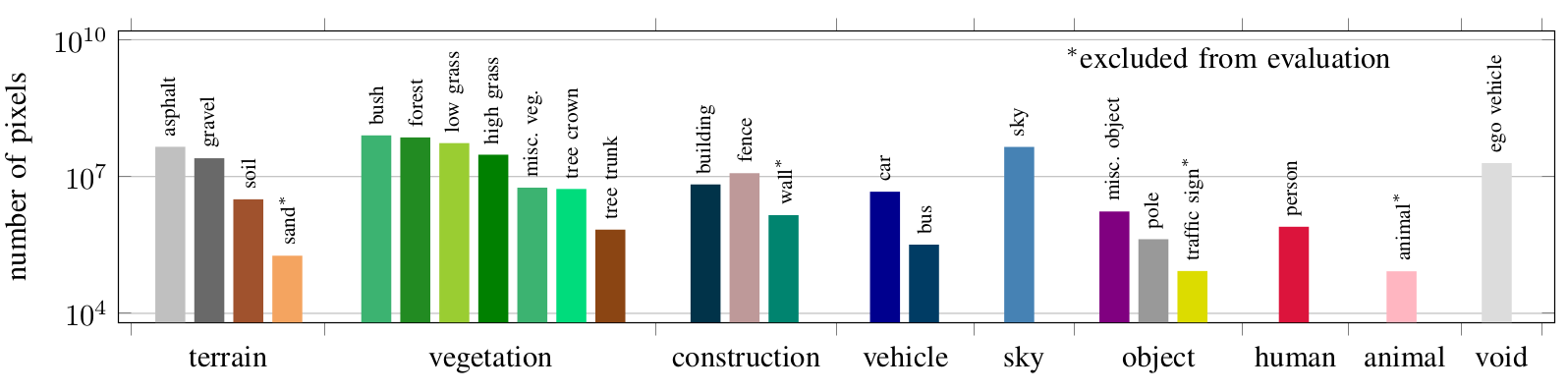
The TAS500 dataset contains fine-grained terrain and vegetation annotations
of over 500 scenes in unstructured environments.
|
|
|
|
|
|
|
|
|
|
|
|
The TAS500 dataset contains fine-grained terrain and vegetation annotations of over 500 scenes in unstructured environments. |
 |
Metzger, Mortimer, Wuensche. A Fine-Grained Dataset and its Efficient Semantic Segmentation for Unstructured Driving Scenarios ICPR, 2020. |
 |
|
 |
|
Download |
Acknowledgements |